Robot Paralelo Binario de Locomoción Tipo Oruga
Sistema robótico de alta robustez y bajo consumo para el desplazamiento en superficies mediante actuadores de estado discreto y articulaciones de geometría avanzada.
 |
 |
DESCRIPCIÓN DE LA TECNOLOGÍA
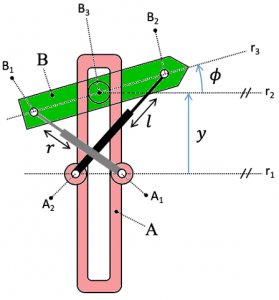
Este dispositivo es un robot móvil diseñado para desplazarse en un plano con dos grados de libertad utilizando una configuración mecánica simplificada pero altamente eficiente. Se compone de dos cuerpos articulados mediante una unión de tipo «pivote-en-ranura», gobernada por solo dos actuadores lineales binarios (todo-nada).
El sistema destaca por dos innovaciones clave:
-
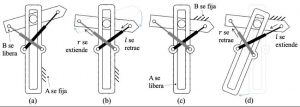
Locomoción Bio-inspirada: Utiliza un movimiento de tipo «oruga». El ciclo consiste en fijar la parte trasera, extender el cuerpo, fijar la parte delantera (liberando la trasera) y retraer el cuerpo. Esta secuencia permite un avance efectivo y estable sobre superficies horizontales o verticales.
-
Geometría Multiestado Sin Singularidades: Gracias a su diseño, el robot puede alcanzar 8 posturas distintas utilizando solo 2 actuadores. Mientras que un robot convencional está limitado a $2^n$ posturas (donde $n$ es el número de actuadores, resultando en 4 para $n=2$), este modelo duplica esa capacidad ($2 \times 2^2 = 8$). Además, permite alternar entre las dos posturas de un mismo estado sin pasar por configuraciones incontrolables (singularidades).
APLICACIONES DE LA TECNOLOGÍA
Como posibles aplicaciones no-limitativas del robot propuesto, éste podría utilizarse como robot trepador para tareas de inspección y mantenimiento en altura de estructuras verticales de hormigón o acero, para evitar que dichas peligrosas tareas sean desarrolladas por operarios humanos que corren el riesgo de caer desde la estructura y sufrir graves daños. La compacidad del robot propuesto y su alta movilidad utilizando un menor número de actuadores le hacen especialmente apto para tareas como la mencionada, o cualquier otra tarea que requiera el movimiento a lo largo de superficies planas verticales u horizontales o con cualquier otra orientación espacial.
VENTAJAS Y ASPECTOS INNOVADORES
-
Eficiencia Mecánica: Logra el mismo número de posturas que otros robots ahorrando un actuador completo, lo que se traduce en una reducción directa de peso, coste, consumo energético y complejidad de control.
-
Robustez y Control Simplificado: Al utilizar actuadores binarios (solo estados totalmente extendidos o retraídos), el sistema es extremadamente robusto frente a fallos de precisión y más sencillo de programar.
-
Estabilidad Superior: La disposición de los actuadores y el tipo de articulación confieren una elevada rigidez estructural, permitiendo ampliar el espacio de trabajo de forma segura.
-
Superación de Singularidades: Es capaz de transitar entre diferentes configuraciones geométricas para una misma extensión de actuadores sin perder la controlabilidad, un problema común en la robótica paralela que este diseño resuelve eficazmente.
GRADO DE DESARROLLO
Actualmente se encuentra en fase de construcción de prototipo de laboratorio. Los modelos matemáticos y cinemáticos ya han sido validados, y el prototipo físico servirá para constatar las ventajas operativas en entornos de prueba reales.
SECTORES DE APLICACIÓN
- Ingeniería Civil y Construcción.
- Sector Energético (Eólica, Solar y Petroquímica).
- Industria Aeroespacial y Naval.
- Empresas de Servicios de Inspección Técnica (NDT).
- Fabricantes de Robótica de Servicios.
INVESTIGADOR PRINCIPAL
Oscar Reinoso García – Instituto Universitario de Investigación en Ingeniería (I3E)